





| ||
| 偁偟偔傃偺偔傒偨偰 | 仯尦偺儁乕僕偵栠傞 |
| 偳偆偨偄偺偔傒偨偰 | |
| 偁偟偺偔傒偨偰 | 亂丠亃傢偐傜側偗傟偽 |
| 偆偱偺偔傒偨偰 | |
| 働乕僽儖偺偣偄傝 | |
| 偁偨傑偺偔傒偨偰 | |
 | 丂傑偢3mm亊8mm偺嶮價僗傪偮偐偭偰丄懌棤偺傇傂傫偵懌庱偺傇傂傫傪庢傝晅偗傑偡丅 |
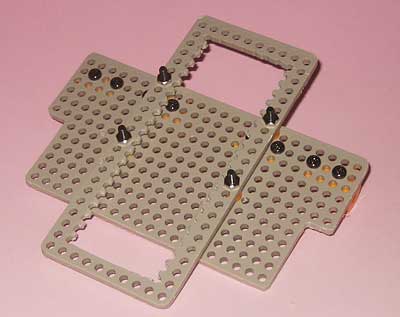
 | 丂嵍偺幨恀偺傛偆偵丄懌棤傇傂傫偺寠傪寢傫偩慄偲丄懌庱晹昳偲偑暯峴偵側傞傛偆偵婥傪偮偗偰偹偠傪偟傔偮偗傛偆丅 |
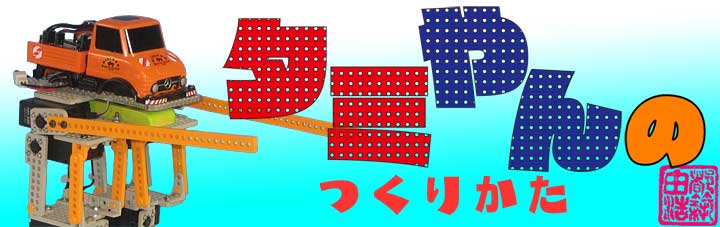
 | 丂懌庱傇傂傫偺僒乕儃儂乕儞偵僒乕儃傪偲傝偮偗傑偡丅 |
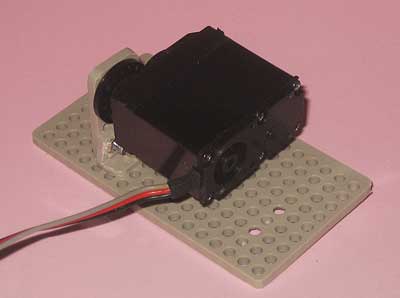
 | 丂斀懳懁偺懌庱傇傂傫傪偲傝偮偗傑偡丅 僒乕儃儂乕儞懁偲摨偠傛偆偵丄懌棤傇傂傫偺嶮價僗壛岺傪偟偨偲偙傠偐傜丄3mm亊8mm偺嶮價僗傪偮偐偭偰偲傝偮偗傑偡丅 |
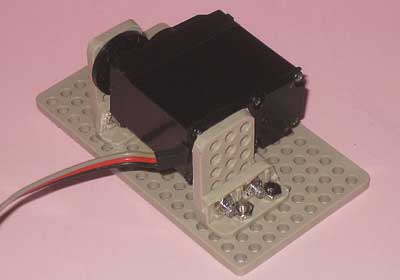
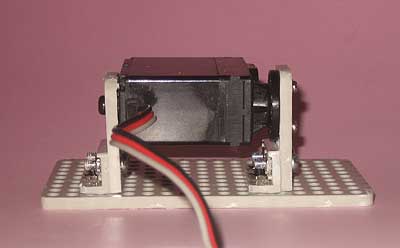 | 丂墶偐傜尒偨偲偒偵丄懌庱傇傂傫偺懌偑嵍偺幨恀偺捠傝偵側傞傛偆偵偲傝偮偗傑偟傚偆丅 偦偺偁偲丄懌庱傇傂傫傪捠偟偰僒乕儃偺棤懁偵3mm亊5mm偺僫儀摢僱僕傪偟傔偙傒傑偡丅 壓偺幨恀偺捠傝偵側傟偽丄懌庱傇傂傫偺姰惉偱偡丅 懌庱偼丄嵍塃1偮偢偮丄崌寁2偮嶌傝傑偡丅 |
 | |
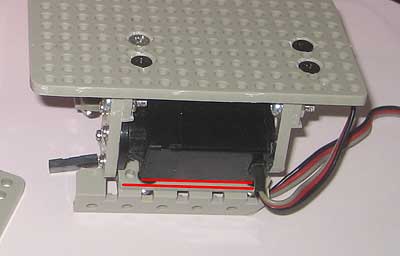
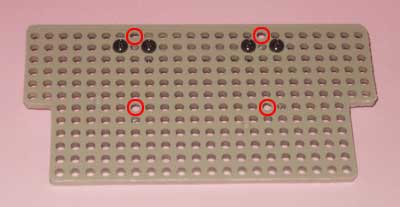 | 丂傑偢3mm亊8mm偺僫儀摢價僗傪丄嵍偺夋憸偺偲偍傝4杮嵎偟崬傫偱偍偒傑偡丅偙傟偼嵎偟崬傓偩偗偱傑偩僫僢僩偱偟傔偨傝偼偟傑偣傫丅 愒偄仜偑偮偄偰偄傞偲偙傠偑丄棤懁偐傜嶮價僗偐偙偆傪偟偰偁傞寠偱偡丅 |
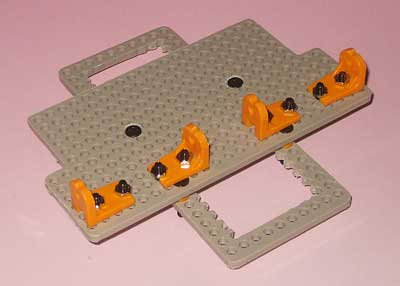
 | 丂僶僢僥儕乕儂儖僟乕偺傇傂傫傪偲傝偮偗傑偡丅3mm亊15mm偺嶮價僗4杮傪偮偐偭偰丄摲懱傇傂傫偺棤懁偐傜僱僕傪捠偟丄5mm岤偺僗儁乕僒乕乮僷僀僾乯傇傂傫傪捠偟偰偐傜丄僶僢僥儕乕儂儖僟乕晹昳傪偲傝偮偗傑偡丅 丂偙偺帪丄傑偊偑傢偺僱僕偑丄僶僢僥儕乕儂儖僟乕傇傂傫偺慜偐傜7斣栚偺寠偵擖傝傑偡丅 丂嵍幨恀偺傛偆偵傑偢僫僢僩傪偮偗傞偩偗偱掲傔崬傑偢偵4杮偺僱僕傪偲傝偮偗偰偐傜丄偁偲偱傑偲傔偰4杮偺僱僕傪偟傔偙傓傛偆偵偡傟偽慻傒棫偰傗偡偄偱偟傚偆丅 |
 | 丂偁傜偐偠傔捠偟偰偁偭偨僱僕偱L偑偨嵽傪偲傝偮偗傑偡丅 丂奜懁偺L偑偨嵽傕3mm乮捈宎乯亊8mm乮挿偝乯偺僫儀摢僱僕偱偲傝偮偗傑偡丅 偙偺L偑偨嵽偵偼丄偁偲偱懌偺晹昳偑偔偭偮偒傑偡丅 |
 | 丂忋懁偐傜傒偰偙偺傛偆偵側傟偽丄摲懱偼姰惉偱偡丅 |
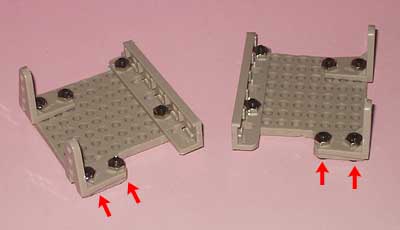 | 丂傑偢丄懌庱僒乕儃傪偲傝偮偗傞懌傇傂傫偐傜慻傒棫偰傑偡丅 丂愒偄栴報偱偝偟偨4杮偺價僗偑丄3mm亊8mm偺僫儀摢價僗丅偦傟埲奜偼丄3mm亊8mm偺僒儔摢價僗傪偮偐偄傑偡丅 丂嵍偺夋憸偺偲偍傝偵懌傇傂傫偵L偑偨嵽傪偲傝偮偗傑偡丅 |
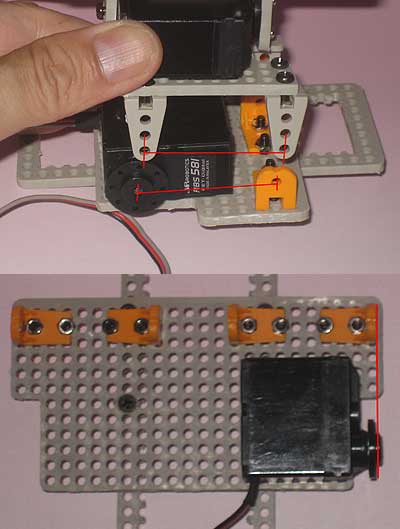
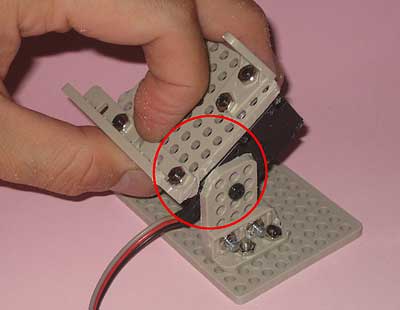 | 丂懌庱僒乕儃傪愙拝偡傞慜偵丄懌庱傪摦偐偟偨偲偒偵晹昳偳偆偟偑傇偮偐傜側偄偙偲傪偨偟偐傔偰偍偒傑偟傚偆丅 丂嵍偺幨恀偺傛偆偵丄僒乕儃傪側側傔偵摦偐偟偨偲偒偵丄愒偄仜偱埻傫偩傇傇傫偑傇偮偐傜側偄偙偲傪偨偟偐傔傑偡丅斀懳懁偺僒乕儃儂乕儞懁傕丄摨偠傛偆偵傇偮偐傜側偄偙偲傪妋擣偟偰偍偒傑偟傚偆丅 |
 | 丂僒乕儃偼椉柺僥乕僾偱愙拝偟傑偡丅 丂椉柺僥乕僾偼丄嵍偺幨恀偺捠傝丄偱偒傞偩偗偨偔偝傫偺柺愊偱揬傝晅偗傞傛偆偵偟傑偟傚偆丅偦偺傎偆偑忎晇偵側傞傛丅 |
 | 丂僒乕儃傪愙拝偡傞応強偵拲堄偟傛偆丅 偝偭偒妋偐傔偨偲偍傝丄懌傇傂傫偲懌庱晹昳偲偑傇偮偐傜側偄応強偱丄嵍偺幨恀偺愒偄慄偺偲偍傝丄懌傇傂傫偺斅偺慄偲僒乕儃偲偑暯峴偵側傞傛偆偵婥傪偮偗傛偆丅 |
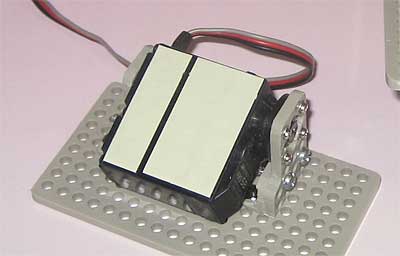
 | 丂師偼懌僒乕儃傪偲傝偮偗傑偡丅 丂懌僒乕儃偼丄忋偱嶌偭偨摲懱傇傂傫偺棤懁偵丄懌庱僒乕儃偲摨偠傛偆偵椉柺僥乕僾偱愙拝偟傑偡丅 丂懌僒乕儃偺偲傝偮偗応強師戞偱偱偒偁偑偭偨儘儃僢僩偺摦偒偺椙偟埆偟偑偒傑傞偺偱丄拲堄偟傛偆丅 丂嵍偺幨恀偺忋懁偵偁傞愒偄慄偺偲偍傝丄懌傇傂傫偺L偑偨嵽偺寠偺娫偺挿偝偲丄摲懱偺L偑偨嵽偲僒乕儃偺幉偺娫偺挿偝偑摨偠偵側傞傛偆偵丅 丂偦偟偰恀忋偐傜尒偨偲偒偵偼丄嵍偺幨恀偺壓懁偺傛偆偵丄摲懱偺L偑偨嵽偲僒乕儃儂乕儞偺柺偑堦捈慄偵側傞傛偆偵丄婥傪偮偗傛偆丅 |
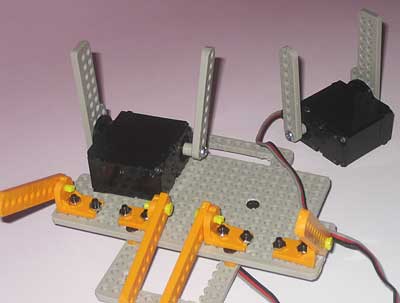 | 丂懌僒乕儃偺曅曽傪偲傝偮偗偨傜丄嵍偺幨恀偺捠傝偵愭偵懌傾乕儉傪偲傝偮偗傛偆丅偁偲偐傜偵偡傞偲丄斀懳懁偺僒乕儃偑偠傖傑偵側偭偰偹偠傪偟傔傜傟側偔側偭偰偟傑偆偧丅 丂僒乕儃儂乕儞偺斀懳懁偺懌傾乕儉偺偲傝偮偗偼丄5mm偺僗儁乕僒乕傪捠偟偰12mm僫儀摢價僗傪巊偍偆丅偙偺晹暘偼姰慡偵偟傔崬傫偱偟傑偆偺偱偼側偔丄懌傾乕儉偑摦偔掱搙偵丄姰慡偵偟傔崬傫偩埵抲偐傜敿夞揮偔傜偄僱僕傪備傞傔偰偍偙偆丅 |
 | 丂椉懌偺僒乕儃傪愙拝偟偰丄懌傾乕儉傪懌晹昳偲偮側偘傟偽丄嵍偺幨恀偺傛偆側奿岲偵側傝傑偡丅偝偁丄偁偲彮偟偱姰惉偩偧丅 丂側偍丄嵍偺幨恀偱偼墿怓偄僾儔儕儀僢僩傪巊偭偰偄傑偡偑丄懌傇傂傫乮壓偑傢乯偺屌掕偼僆儗儞僕怓偺僾儔儕儀僢僩傪巊偭偨曽偑偄偄偱偟傚偆丅 僆儗儞僕怓偺僾儔儕儀僢僩偼丄墿怓偺傛傝傕彮偟抁偄偺偱偡丅 |
 | 丂偆偱傇傂傫偼丄僒乕儃儂乕儞傪偲傝偮偗偨傇傂傫偲丄儐僯僶乕僒儖傾乕儉傪僱僕巭傔偟偰嶌傝傑偡丅僱僕偼3mm亊8mm偺僫儀摢僱僕傪2杮偢偮崌寁4杮巊偄傑偡丅傑偭偡偖偵側傞傛偆偵婥傪偮偗側偑傜丄備傞傑側偄傛偆偟偭偐傝偲偟傔偮偗傑偟傚偆丅 丂儐僯僶乕僒儖傾乕儉偼丄儔儞僫乕偐傜愗傝棧偟偨偦偺傑傑傪巊偄傑偡丅 |
 | 丂偆偱偵巊偆僒乕儃傕丄椉柺僥乕僾偱愙拝偟傑偡丅摲懱偺晹昳偑搑拞偱側偔側偭偰偄傞偺偱丄椉柺僥乕僾偼嵍偺幨恀偺傛偆偵巊偄傑偟傚偆丅 丂嵍偺幨恀偼丄嵍偆偱梡偺僒乕儃傪偠偔懁偲斀懳懁偐傜偆偮偟偨傕偺偱偡丅嵍塃偑偁傞偺偱丄椉柺僥乕僾傪揬傝偮偗傞柺偵偼婥傪偮偗傑偟傚偆丅 |
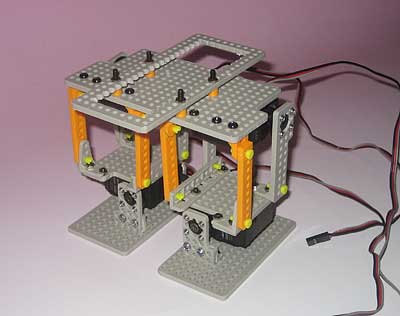
 | 丂偆偱偺僒乕儃偼丄僶僢僥儕乕儂儖僟乕傇傂傫偵傄偭偨傝偲崌傢偣偰丄僒乕儃偺幉偑摲懱偺恀傫拞傪捠傞傛偆側埵抲偵愙拝偟傑偡丅 丂壓偺嵍偺幨恀偺傛偆偵丄嵟弶偵嶌偭偨偆偱傇傂傫偼丄恀忋偵岦偗偰偲傝偮偗傑偡丅偱傕崱偼丄摲懱傪慻傒棫偰傗偡偄傛偆偵傑偩偆偱傇傂傫偼偲傝偮偗偢偵抲偄偰偍偒傑偟傚偆丅 |
 | |
 | 丂偁偨傑傪慻傒棫偰傞慜偵丄懌偺僒乕儃偐傜弌偰偄傞働乕僽儖傪偒傟偄偵偣偄傝偟偰偍偒傑偟傚偆丅偆傑偔偣偄傝偟側偄偲丄儘儃僢僩偑偆傑偔摦偗側偔側偭偰偟傑偆偧丅 丂働乕僽儖傪偣偄傝偡傞偵偼丄偁偨傑偺偳偙偐傜働乕僽儖傪擖傟傞偺偐偁傜偐偠傔峫偊偰偍偐側偗傟偽偄偗傑偣傫丅嵍偺夋憸偺傛偆偵丄偁偨傑偵偡傞傇傂傫偺拞偵丄偳傫側傆偆偵僐儞僺儏乕僞儃乕僪傗僐儞僩儘乕儔乕偺庴怣婡傪抲偔偐寛傔偰丄偦偺応強偵偮側偓傗偡偄偲偙傠偐傜働乕僽儖傪偁偨傑偺拞偵堷偒崬傒傑偟傚偆丅 丂僐儞僺儏乕僞儃乕僪偵偮側偖偨傔偺働乕僽儖偼偨偔偝傫偁傞偺偱丄働乕僽儖傪捠偡偨傔偺応強偺偙偲傕峫偊偰偍偐側偄偲丄偁偲偱戝曄側偙偲偵側偭偰偟傑偆傛丅 |
 | |
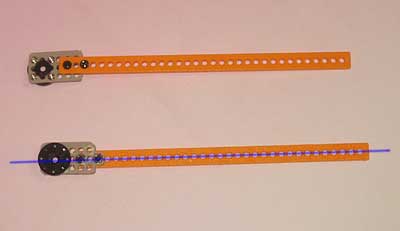
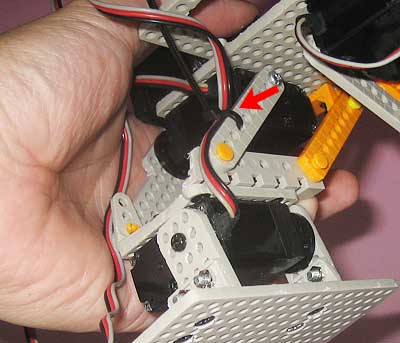 | 丂僒乕儃働乕僽儖傪偣偄傝偡傞帪偼丄僒乕儃傪摦偐偟偰傕働乕僽儖偑傂偭傁傜傟側偄傛偆偵拲堄偟側偔偰偼偄偗側偄傛丅 丂傑偢偼丄懌傪慜屻偵摦偐偟偰丄偳偪傜偱働乕僽儖偑堷偭挘傜傟傞偐僠僃僢僋偟偰傒傛偆丅偙偺応崌偼丄忋幨恀偺愒偄仜偺拞傪尒傟偽傢偐傞傛偆偵丄懌傪偆偟傠偑傢偄偭傁偄偵怳偭偨偲偒偵丄働乕僽儖偑傂偭傁傜傟側偄傛偆偵屌掕偡傟偽偄偄傫偩偹丅 丂嵍偺幨恀偼丄懌庱僒乕儃偺働乕僽儖傪寢懇僶儞僪偱偟偽偭偨偲偙傠偱偡丅偟偽偭偨偁偲偱丄傕偆堦搙働乕僽儖偑傂偭傁傜傟側偄偐懌傪慜屻偵摦偐偟偰妋偐傔偰偍偙偆丅 |
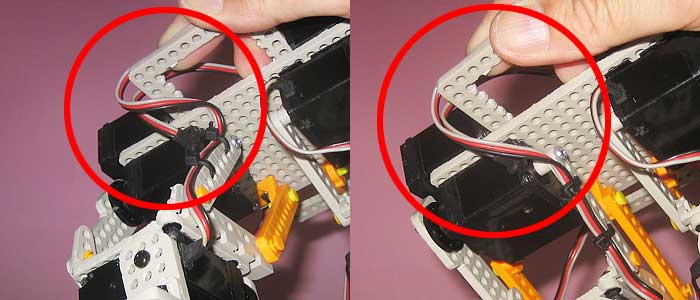 | |
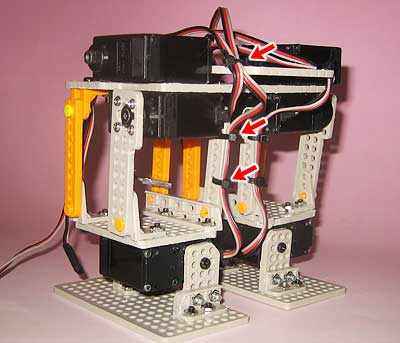 | 丂偁偟僒乕儃偺働乕僽儖偺挿偝傕摨偠傛偆偵僠僃僢僋偟傛偆丅 丂忋偺幨恀偺愒偄仜偺拞傪尒傟偽丄崱搙偼偁偟傪慜偵弌偟偨偲偒偵働乕僽儖偑堦斣傂偭傁傜傟傞偺偑傢偐傞傛偹丅 崱搙偼偁偟傪偄偭傁偄偵慜偵怳偭偨忬懺偱僶僢僥儕乕儂儖僟乕傇傂傫偵働乕僽儖傪偟偽傠偆丅偝偭偒偺懌庱僒乕儃偺働乕僽儖偲2杮傑偲傔偰偟偽傞偲偄偄傛丅 丂嵍偺幨恀偺傛偆偵丄曅懌偵偮偄偰3僇強偱働乕僽儖傪偟偽傝傑偡丅堦斣忋偺僶僢僥儕乕儂儖僟乕傇傂傫偵偟偽傞偲偙傠偩偗偼丄僒乕儃2屄暘偺働乕僽儖傪傑偲傔偰偟偽偭偰偁傝傑偡丅 丂椉懌偺働乕僽儖傪摨偠傛偆偵傑偲傔傟偽丄働乕僽儖偺偣偄傝偼偍傢傝偱偡丅 |
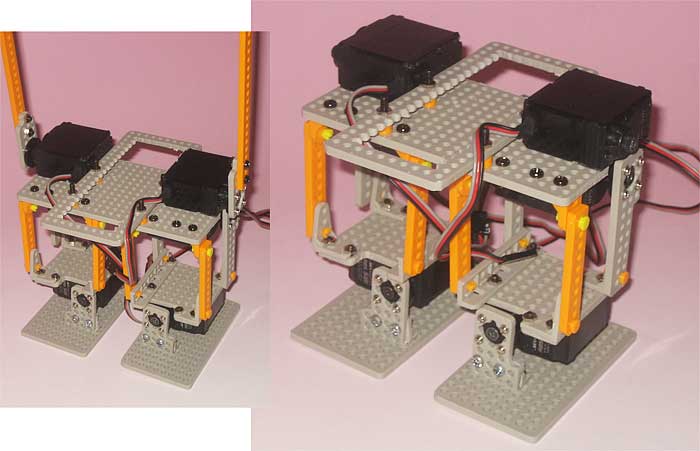
 | 丂摢偵偡傞僾儔儌僨儖偺儃僨傿傪曐岇偡傞偨傔偵丄儐僯僶乕僒儖僾儗乕僩偺戜嵗傪嶌傝傑偡丅偙偺戜嵗偼丄彫偝偄曽偺儐僯僶乕僒儖僾儗乕僩偺挿偝傪挷惍偟偰嶌傞偺偱偡偑丄嵍偺夋憸偺愒怓偺晹昳偺傛偆偵丄摢偵偡傞晹昳傛傝慜屻偵彮偟偩偗戝偒偔側傞傛偆偵愗傝偩偟傑偡丅 |
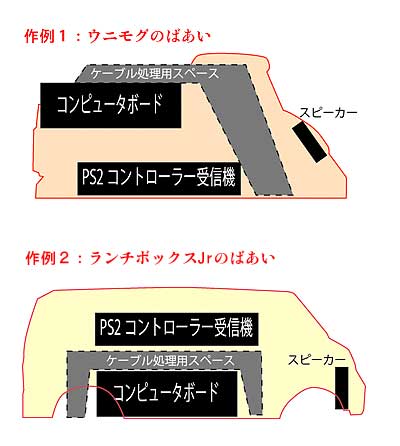
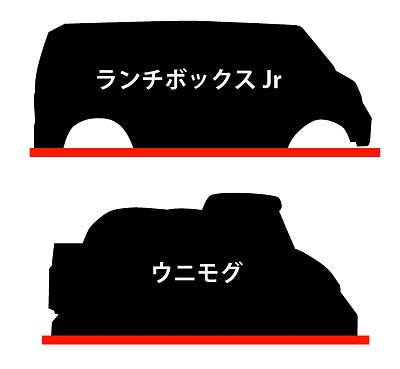
 | 丂椉榬偺僒乕儃偺忋偵椉柺僥乕僾偱愙拝偟偰摢傪巟偊傞偨傔偺晹昳偼丄偁偨傑偺拞偵偳偺傛偆偵晹昳傪偍偝傔傞偐偵傛偭偰宍偑偐傢偭偰偒傑偡丅 丂嵍偺幨恀偺忋敿暘偼儔儞僠儃僢僋僗Jr傪巊偭偨応崌偺嶌椺偱丄戜嵗偺僾儗乕僩偺忋偵僐儞僺儏乕僞儃乕僪傪偺偣傞応強傪偁偗傞偨傔偵丄僱僕偺埵抲偑慜屻偵戝偒偔棧傟偰偄傑偡丅 丂壓敿暘偼僂僯儌僌偺儃僨傿傪偺偣傞偲偒偺椺偱丄儐僯僶乕僒儖僾儗乕僩偺宍偼偲偰傕扨弮偱偡丅 |
 | 椉榬偺僒乕儃偺忋偵椉柺僥乕僾偱戜嵗偺晹昳傪愙拝偟偨傜丄偁偨傑偺拞偺晹昳傪慻傒棫偰偼偠傔傛偆丅 嵍偺幨恀偼儔儞僠儃僢僋僗Jr偺儃僨傿偺拞偵偍偝傑傞傛偆偵僐儞僺儏乕僞儃乕僪傪偲傝偮偗偨偲偙傠偱偡丅椉柺僥乕僾偱愙拝偟偰偁傝傑偡丅 |
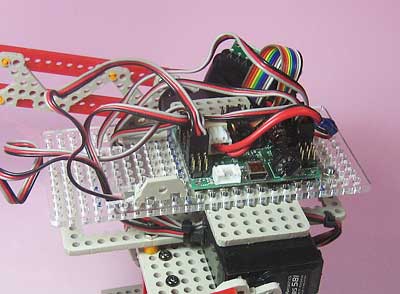
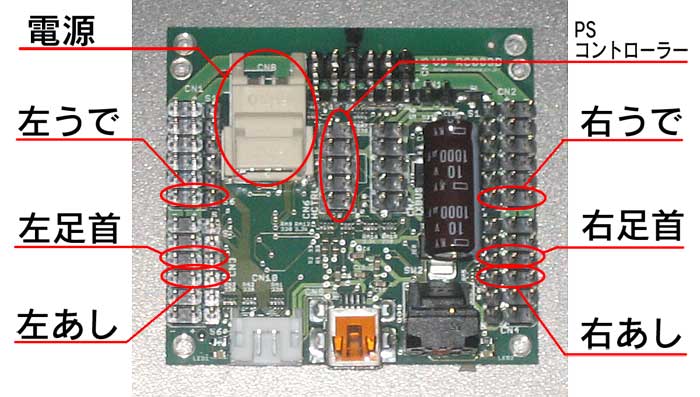
 | 丂僂僯儌僌偺儃僨傿傪巊偆応崌偼丄嵍偺幨恀偺傛偆偵丄儃僨傿偺拞偵偼PS僐儞僩儘乕儔乕偺庴怣婡偑擖傝傑偡丅偨偩偟丄偙偺応崌偼亀嵽椏亁偺偲偙傠偱梡堄偟偨僐僱僋僞乕儃乕僪偼擖傜側偄偺偱丄僐僱僋僞偺晹昳偩偗傪巊偭偰働乕僽儖傪捈愙僴儞僟晅偗偟偰偁傝傑偡丅 丂僴儞僟晅偗偼僐僣偑偄傞偺偱丄戝恖偺恖偵傗偭偰傕傜偍偆丅 僐儞僺儏乕僞儃乕僪偺庢傝晅偗偑偱偒偨傜丄僒乕儃偐傜偺働乕僽儖傪偮側偛偆丅壓偺儃乕僪偺幨恀偵丄偦傟偧傟偺僒乕儃傪偮側偖応強偲丄揹尮僐僱僋僞偺埵抲丄PS僐儞僩儘乕儔乕偺庴怣婡偵偮側偑傞僐僱僋僞偺埵抲傕彂偄偰偁傞偺偱丄偙偺偲偍傝偵偮側偘傛偆丅 |
 | |
| 偙偺晹暘偼偪傚偭偲擄偟偄偺偱丄屻擔傕偆彮偟偔傢偟偄愢柧傪偺偣傞傛丅傕偆偪傚偭偲懸偭偰偹丅 | |