| ||
| ロボビーメイカー2について | ▲元のページに戻る | |
| モーションのつくりかた | ||
| きほんのモーションダウンロード | 【?】わからなければ | |
| こえのつくりかた | ||
|
タミやんを動かすためには、『モーション』と呼ばれる動きのプログラムを作る必要があります。 『モーション』は、WindowsXPまたはVISTAがインストールされたパソコンを使って、『ロボビーメイカー2』というソフトウェアで作ります。 |
|
| 『ロボビーメイカー2』は、右のボタンのリンク先『VSTONE(ブイストン)』のホームページからただでダウンロードすることができます。 まずはWindowsパソコンに『ロボビーメイカー2』をインストールしてください。ロボビーメイカー2の使い方は、下のコーナーで簡単に説明します。 |
 ダウンロード |
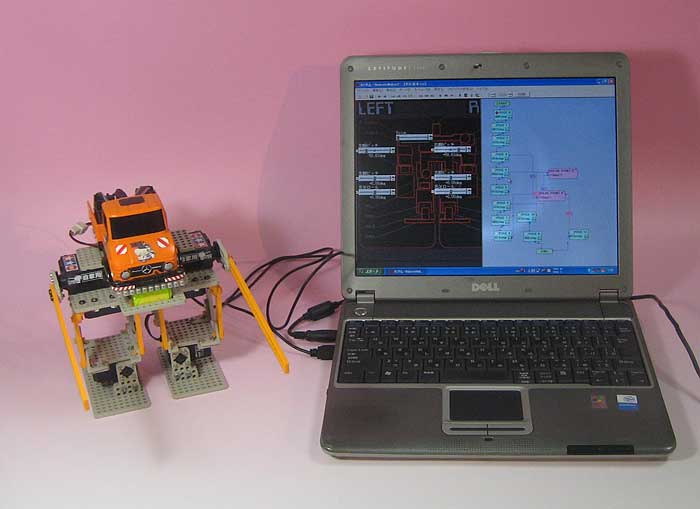 |
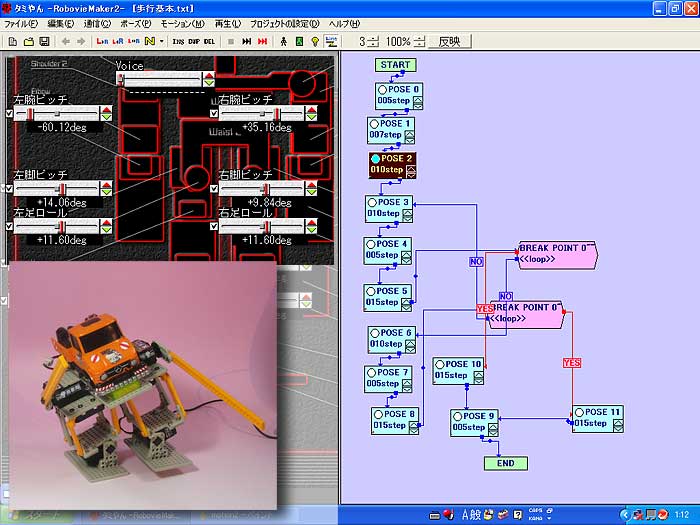
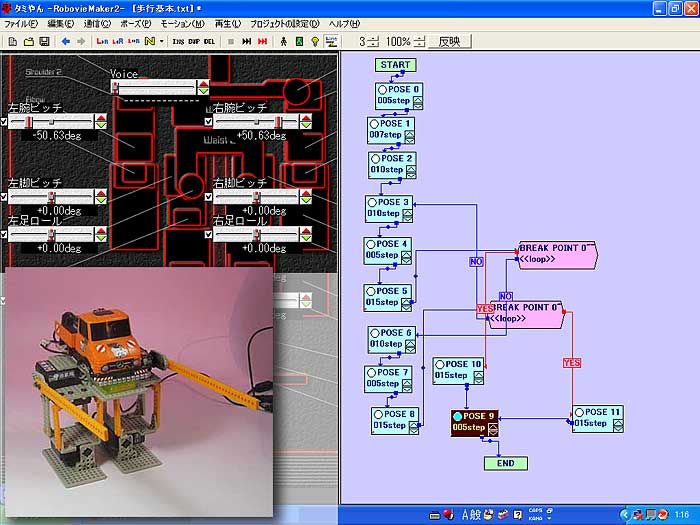
| モーションを作るには、まずタミやんとパソコンをUSBケーブルでつなぎます。がぞうではよく見えないけれど、タミやんの背後のコンピュータにパソコンからのびたケーブルがつながっています。 パソコンではロボビーメイカー2を起動(きどう)しておきます。 画像のパソコンにはすでに歩行(ほこう)モーションが表示されています。 |
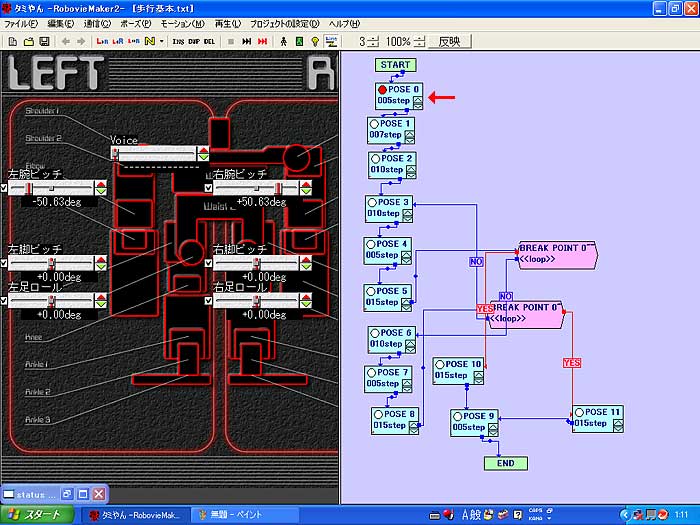 |
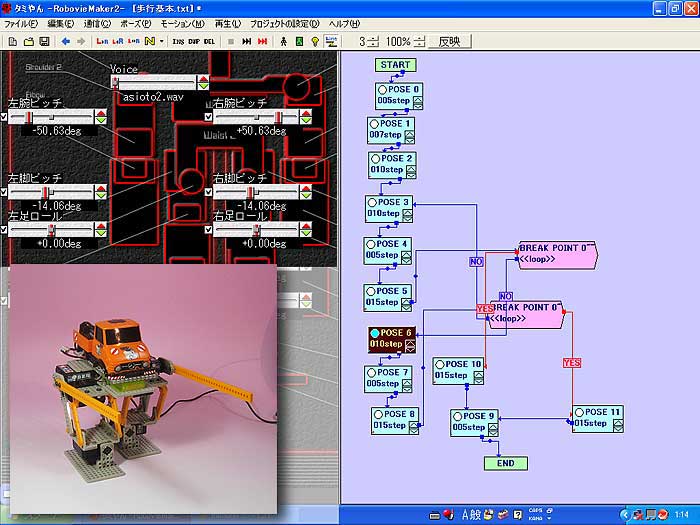
 ロボビーメイカーでは、ロボットの動きをパラパラマンガをえがくようりょうで作っていきます。 ロボビーメイカーでは、ロボットの動きをパラパラマンガをえがくようりょうで作っていきます。動きの途中のポーズをいくつか作って、その順番を指定し、前のポーズから今のポーズまでにかかる時間を指定するのです。 モーションの最初と最後には、必ずきほんの立ちポーズを入れておきます。 タミやんのばあいは、このように両うでを前につきだしたポーズが基本になっています。 |
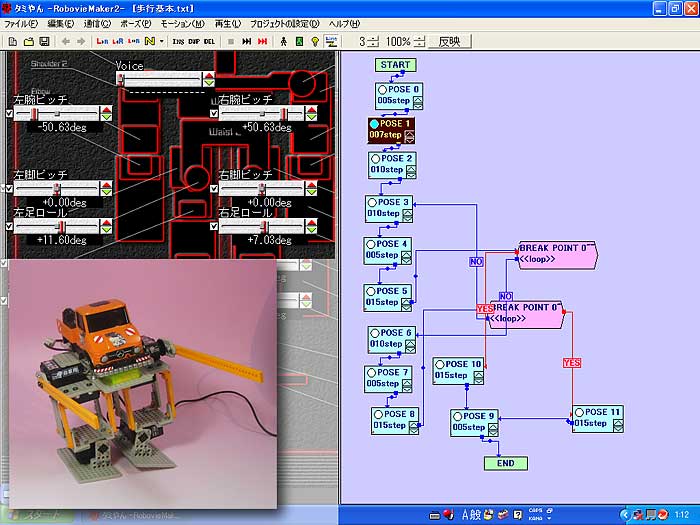 |
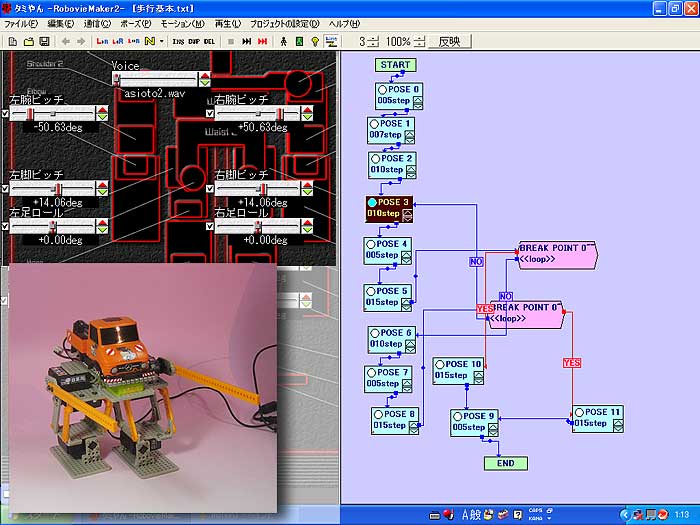
| きほんのポーズから足を前にふみだす前に、バランスをとるために右足に重心移動します。りろんのページで書いた、片足を上げてもコケないためです。 このとき、右足をかたむけるだけでは重心移動できないので、左足でからだ全体をかたむけるように押しています。 |
 |
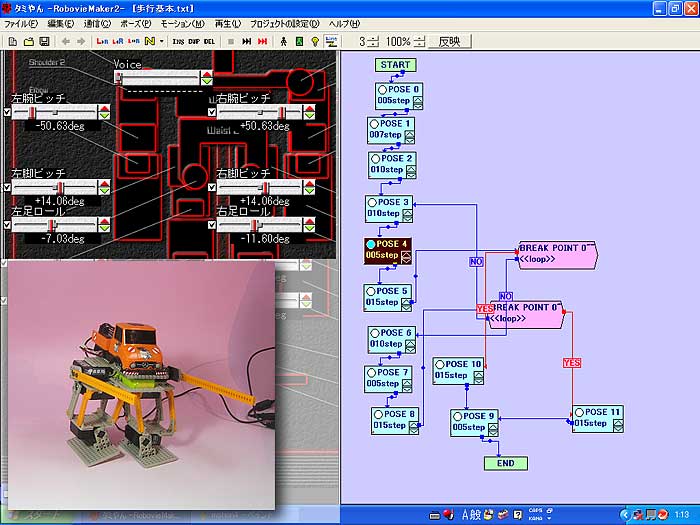
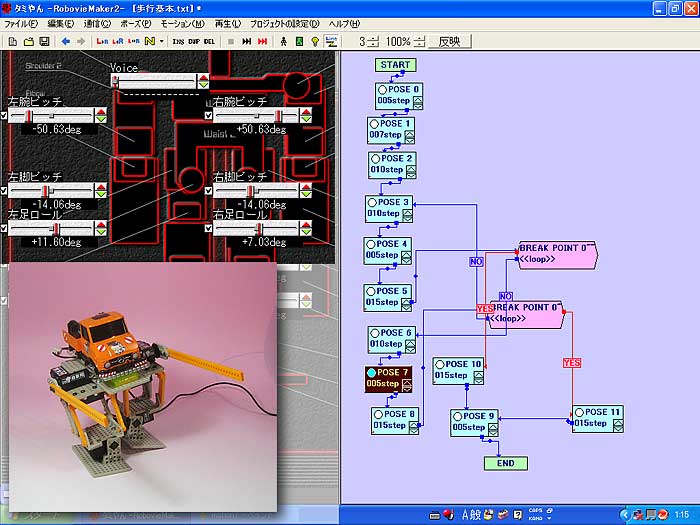
| 重心移動ができたので、左足を前に出します。左足は、右足と同じ角度にして地面と水平にしています。 |
 |
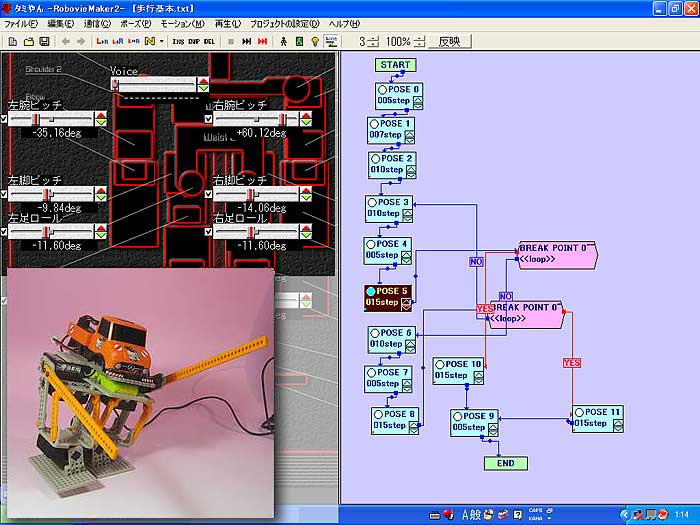
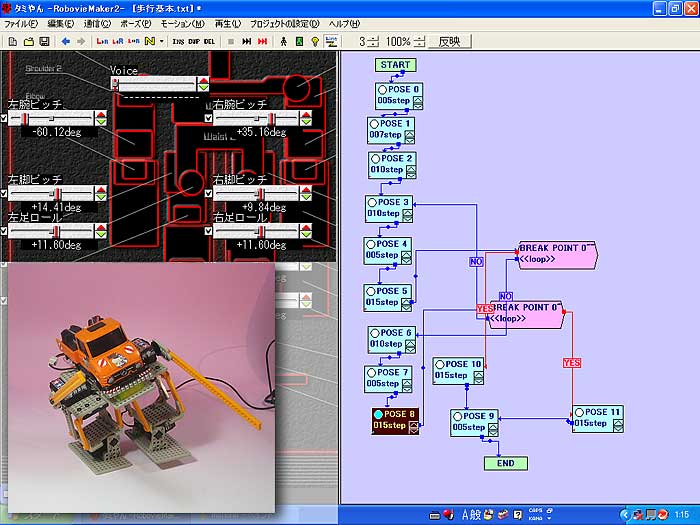
| 右足のかたむきを元に戻して、左足をじめんに降ろしました。これで一歩前進です。 |
 |
| 今度は重心を左側に移動します。左足をかたむけ、右足で全身を押して重心移動します。 |
 |
| 重心移動が終わったら、左足のときと同じように、右足を前に出します。 |
 |
| 左足のかたむきを元に戻して、右足を地面に降ろします。これで左右一歩ずつ歩きました。 |
 |
| 再び右足に重心移動します。このとき、最初の立ちポーズから右足に重心移動したときとはポーズが違うことに注意してください。歩いている途中のポーズは、止まっているところから動き出すときのポーズとは違うのです。 |
 |
| 左足を前に出します。 ここで、プレステコントローラーのボタンを押し続けているときは、前の左足を地面に降ろすところに戻ります。 コントローラーのボタンがはなされていたときは、下の画像の「歩きをやめる」ポーズに移動します。 |
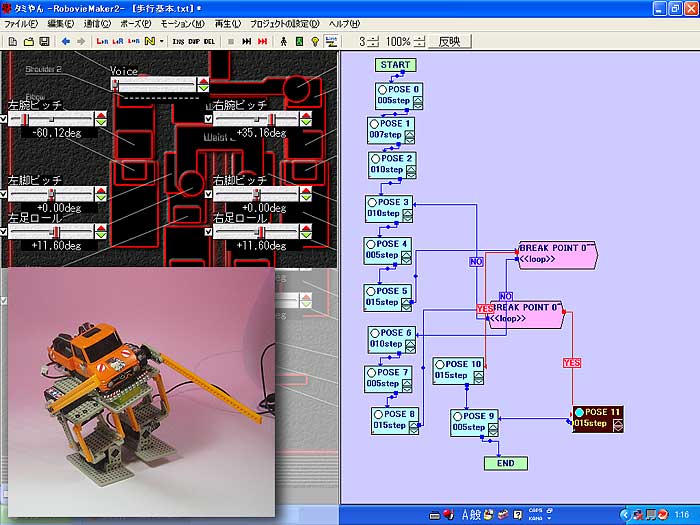 |
| 歩きをやめるために、重心を右足にのせたまま両足がそろった位置で動きを止めています。 |
 |
| 足を降ろして基本の立ちポーズに戻ります。 |
