



| ||
| ロボットはなぜこけないのか | ▲元のページに戻る |
| タミやんのあしのしくみ | |
| そのほかのタミやんのこうぞう | 【?】わからなければ |
| どうやってそうじゅうするのか | |
2足歩行ロボットは、人間とおなじように2本の足で立って歩くロボットです。
歩くためには片足を上げなければいけませんが、ただ足を上げるだけでは、ロボットはたおれてしまいます。
人間は、歩くときに片足を上げても、身体の他の場所でバランスをとっているのです。
ここでは、ロボットが片足を上げても倒れないようにするほうほうをせつめいします。
 右の図は、ロボットが立っているところです。
右の図は、ロボットが立っているところです。 右の図は、ただ単純にまっすぐ片足を上に上げたところです。
右の図は、ただ単純にまっすぐ片足を上に上げたところです。 図3では、ロボットは片足を上げながらバランスもとっています。
図3では、ロボットは片足を上げながらバランスもとっています。 タミやんのあしには両足で4つのサーボが使われています。
上でせつめいしたように、足首を横にかたむけられないと歩くことができませんから、左右それぞれの足首を横にかたむけるために1個ずつ、ごうけい2個。
また、足ぜんたいを前後にうごかすために左右それぞれ1個、ごうけい2個のサーボを使っています。
 あしを前後にうごかすのには、すこしふくざつなしくみを使っています。
あしを前後にうごかすのには、すこしふくざつなしくみを使っています。
右の図で、赤い●の部分は回転するようになっています。
あしがまっすぐ立っているときは、もちろん「どうたい」も地面にまっすぐになっています。
あしになるオレンジ色の部品は「どうたい」とも「地面」とも直角です。
あしを前後にうごかすためには、オレンジ色の部品をななめにします。
こうすると右図のように、あしを前後に動かしてもどうたいはいつも地面にまっすぐです。
このしくみを「平行(へいこう)リンク」といいます。
このしくみのおかげで、タミやんはどうたいをかたむけずにサーボ1個(両足で2個)だけで足を前後に動かすことができるのです。
あしを前後に動かすためにごうけい2個のサーボを使っていますから、足首をかたむけるサーボとごうけいして、あしだけで4個のサーボを使うことになります。
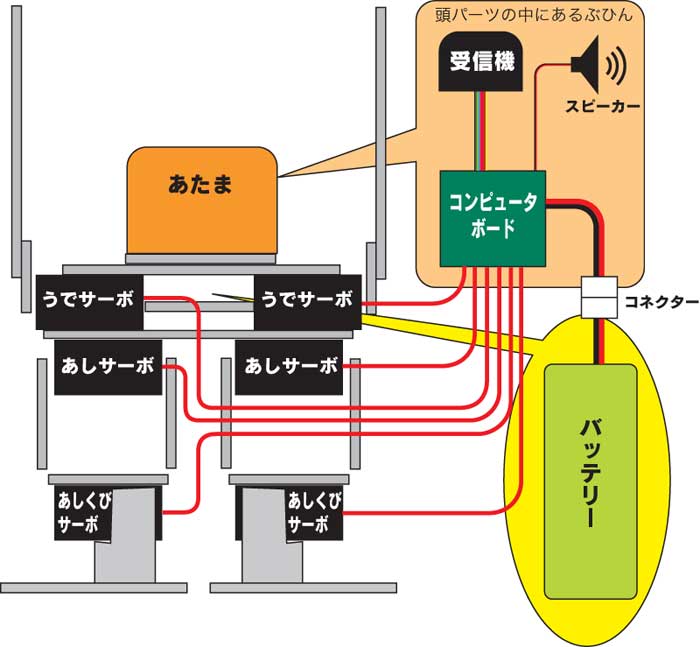
あしに使っている4つのサーボいがいにも、タミやんにはいろんなパーツが使われています。それらがどこにあるかしっておきましょう。
ロボットにはたくさんの関節(動くところ)があって、それぞれの関節を動かすことでポーズをとったり歩いたり踊ったりしています。
でも、そんなにたくさんの関節を、どうやってコントロールしているのでしょうか。
じつは、ロボットのそうじゅうは一つ一つの関節をちょくせつ動かしてはいません。
あらかじめ決められた動きのプログラムを作って、ボタン一つ押すことでそのプログラム通りの動きをさせているのです。
この動きのプログラムのことを『モーション』といいます。
下の図を見てください。
ホビーロボットは、プレイステーション2用の無線コントローラーからそうじゅうします。
コントローラーのボタンを押すと、その信号がロボットに搭載したコントローラー受信機に行き、そこからコンピューターボードへと送られます。
コンピューターボードは、押されたボタンによってあらかじめ決められたモーションを呼び出し、それぞれの関節に繋がるサーボへ命令を送ります。
こうすることで、少ないボタンで複雑なロボットの操縦を行っています。
そのかわりロボットは、あらかじめ決められたモーション以外の動きをすることができません。
だから、あらかじめ「こんな時にはこのモーションを使う」というふうによく考えてモーションを作っておく必要があるのです。
次に、モーションを作るときにどうするかも簡単にふれておきましょう。
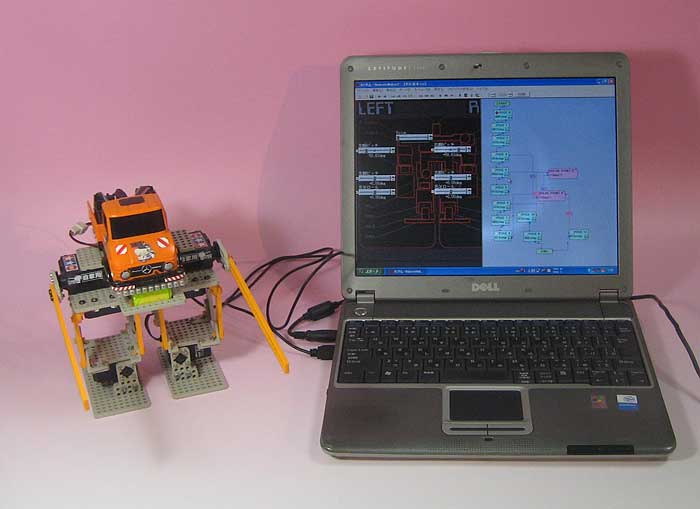 モーションを作るには、パソコンがひつようです。
モーションを作るには、パソコンがひつようです。
上の写真の通りパソコンとタミやんのコンピュータを接続してホビーロボットのモーション作り専用のソフトウェアを使います。パソコンでロボットのポーズを作ると、タミやんがその通りのポーズになります。
パラパラマンガをかくようりょうでいくつかのポーズを作ってひとつのモーションにします。
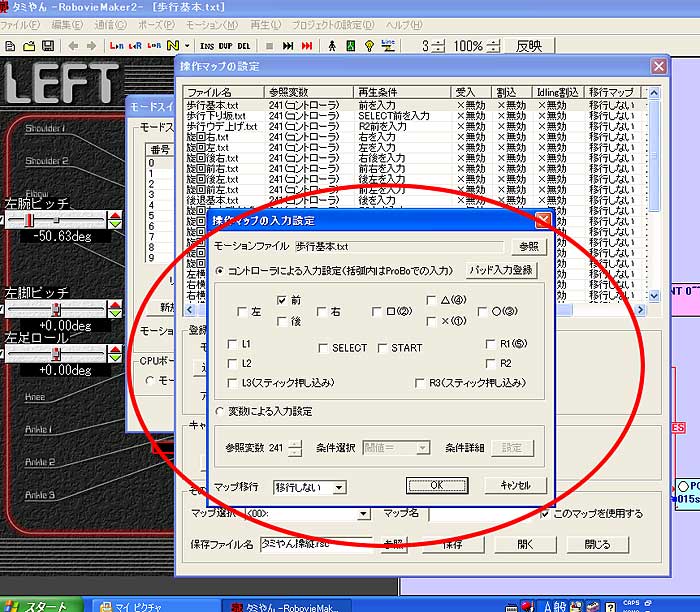
つぎにゲームのコントローラーのどのボタンを押すとそのモーションが再生されるかも、モーション作成用のコンピュータで設定します。(下画像の赤い○の中がその設定用の画面です)
 そうして、いくつかのモーションとボタンの設定をロボットに積んであるコンピューターボードに転送するのです。
そうして、いくつかのモーションとボタンの設定をロボットに積んであるコンピューターボードに転送するのです。
これはロボットを動かすために必要な前じゅんびです。
このホームページでは、タミやんの「歩く」「向きを変える」「(倒れたときに)起き上がる」「簡単なダンス」などのモーションをダウンロードすることができますので基本的なモーションは作る必要はありません。
でも、自分のロボットだけしかできない、世界に一つだけの動きを作るのは、とても楽しいものなので、ぜひ挑戦してみてください。
もっとくわしいせつめいは、『モーション』のページにかいてありますので、あとでよんでくださいね。